

この記事はobniz本家の記事に基づいたものです。
目次
「Tensorflow.jsとPoseNetでパペット人形」
私は、パペット人形がないので、とりあえずサーボまで動かしてみることにしました!
(子供とららぽーとに行ったとき、いいパペット人形を物色します!笑)
obnizでTensorflow.jsとPoseNetを使ってスマホからサーボを動かす!
#obniz 楽しい!簡単!https://t.co/VGm8UQD4Yn
しかも #javascript で、楽楽書けます!今度はサーボ2つ、スマホの傾きで制御できます!もちろんネットワーク越しに
— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月14日
プログラム
プログラムは、本家の記事のままです。そちらをご参照ください。
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<script src="https://unpkg.com/@tensorflow/tfjs"></script>
<script src="https://unpkg.com/@tensorflow-models/posenet"></script>
<meta name="viewport" content="width=device-width, initial-scale=1">
<script src="https://obniz.io/js/jquery-3.2.1.min.js"></script>
<script src="https://unpkg.com/obniz@1.9.1/obniz.js" crossorigin="anonymous"></script>
<script src="https://cdnjs.cloudflare.com/ajax/libs/stats.js/r16/Stats.js"></script>
<style type="text/css">
h2 {
padding: 0.4em 0.5em;
color: #494949;
background: #f4f4f4;
border-left: solid 5px #7db4e6;
border-bottom: solid 3px #d7d7d7;
}
h3 {
background: #c2edff;
padding: 0.5em;
}
.btn-container {
display: flex;
justify-content: center;
}
.btn-control {
flex-grow: 1;
text-align: center;
}
.btn-control input {
font-size: 1.6em;
font-weight: bold;
padding: 10px 30px;
height: 80px;
width: 90%;
}
.data-view {
margin: 8px;
}
.status-view {
font-size: 1.6em;
font-weight: bold;
background: #FFFF99;
text-align: center;
padding: 5px;
}
</style>
</head>
<body>
<div id="obniz-debug"></div>
<h1>Posenet-Obniz</h1>
<h2>
<div id="view-mode"></div>
</h2>
<h3>Change Mode</h3>
<form id="form-select-mode">
<select name="select-mode">
<option value="1" selected>1: Mimic the posture of phone</option>
<option value="2">2: Mimic your pose</option>
<option value="3">3: Stare at you</option>
</select>
<input type="button" id="btn-set-mode" value="SET" />
<div>
<input type="button" id="btn-stop" value="STOP" />
<input type="button" class="btn-reset" value="RESET" />
</div>
</form>
<h3>Control</h3>
<div>
<label>Max Speed
<br>
<input type="range" id="rng-speed" min=0 max=3 step=1>
</label>
</div>
<div>
<label>LPF
<br>
<input type="range" id="rng-lpf" min=0 max=1 step=0.01>
</label>
</div>
<div class="view-contents-mode2 view-contents-mode3">
<video id="video" width="800px" height="600px" autoplay="1" style="position: absolute;"></video>
<canvas id="canvas" width="800px" height="600px" style="position: relative;"></canvas>
</div>
<div class="view-contents-mode1">
<div class="btn-container">
<div class="btn-control">
<input type="button" id="btn-reset" class="btn-reset" value="RESET">
</div>
<div class="btn-control">
<input type="button" id="btn-start" value="START">
</div>
</div>
</div>
<h3>Status</h3>
<div class="view-contents-mode1">
<div id="d1" class="data-view status-view"></div>
<div id="d2" class="data-view"></div>
<div id="d3" class="data-view"></div>
</div>
<div id="d4" class="data-view"></div>
<div id="print"></div>
</body>
<script>
const imageScaleFactor = 0.2;
const outputStride = 16;
const flipHorizontal = false;
const stats = new Stats();
const canvas = document.getElementById('canvas');
const contentWidth = canvas.width;
const contentHeight = canvas.height;
const fontLayout = "bold 20px Arial";
const fontPoint = "bold 15px Arial";
var score = 0;
var mypose = new Object();
var myposition = new Object();
var cvw = canvas.width;
var cvh = canvas.height;
var ang_view = {//angle of view of webcam. for mode 3
x: 90, y: 60
};
async function bindPage() {
const net = await posenet.load();
let video;
try {
video = await loadVideo();
} catch (e) {
console.error(e);
return;
}
detectPoseInRealTime(video, net);
}
async function loadVideo() {
const video = await setupCamera();
video.play();
return video;
}
async function setupCamera() {
const video = document.getElementById('video');
if (navigator.mediaDevices && navigator.mediaDevices.getUserMedia) {
const stream = await navigator.mediaDevices.getUserMedia({
'audio': false,
'video': { width: contentWidth, height: contentHeight }
});
video.srcObject = stream;
return new Promise(resolve => {
video.onloadedmetadata = () => {
resolve(video);
};
});
} else {
const errorMessage = "This browser does not support video capture, or this device does not have a camera";
alert(errorMessage);
return Promise.reject(errorMessage);
}
}
function detectPoseInRealTime(video, net) {
const ctx = canvas.getContext('2d');
const flipHorizontal = true; // since images are being fed from a webcam
async function poseDetectionFrame() {
if (detect_pose == false) { return; }
stats.begin();
let poses = [];
const pose = await net.estimateSinglePose(video, imageScaleFactor, flipHorizontal, outputStride);
poses.push(pose);
ctx.clearRect(0, 0, contentWidth, contentHeight);
ctx.save();
ctx.scale(-1, 1);
ctx.translate(-contentWidth, 0);
ctx.drawImage(video, 0, 0, contentWidth, contentHeight);
ctx.restore();
ctx.font = fontLayout;
drawPoints(poses, ctx);
stats.end();
requestAnimationFrame(poseDetectionFrame);
}
poseDetectionFrame();
}
function getPart(partname, pose) {
return pose["keypoints"].filter(function (partpoint) {
if (partpoint.part == partname) {
// console.log(partpoint);
return true;
}
});
}
function drawPoints(poses, ctx) {
poses.forEach(({ s, keypoints }) => {
keypoints.forEach((partpoint) => {
drawPoint(partpoint, ctx);
drawPointName(partpoint, ctx);
});
});
//get positions and scores
var nose = getPart("nose", poses[0])[0];
var eye_l = getPart("leftEye", poses[0])[0];
var eye_r = getPart("rightEye", poses[0])[0];
var ear_l = getPart("leftEar", poses[0])[0];
var ear_r = getPart("rightEar", poses[0])[0];
var n = nose.position;
var l = eye_r.position;
var r = eye_l.position;
var p_ear_l = ear_l.position;
var p_ear_r = ear_r.position;
//Calculate scores
var score = poses[0]["score"];
var score_nose = nose.score;
var score_face = (
nose.score
+ eye_l.score
+ eye_r.score
+ ear_l.score
+ ear_r.score
) / 5;
ctx.font = fontLayout;
_mypose_yaw = Math.atan2(2 * n.x - l.x - r.x, r.x - l.x);
var ear_y = (p_ear_l.y + p_ear_r.y) / 2;
// mypose.score = score;
if (score_nose > 0.9) {
ctx.fillStyle = "blue";
myposition.yaw = 90 - Math.atan((cvw - 2 * n.x) / cvw * Math.tan(ang_view.x / 2 * Math.PI / 180)) * 180 / Math.PI;
myposition.pitch = 90 + Math.atan((cvh - 2 * n.y) / cvh * Math.tan(ang_view.y / 2 * Math.PI / 180)) * 180 / Math.PI;
ctx.fillText("Nose: " + myposition.yaw.toFixed(0) + ", " + myposition.pitch.toFixed(0), 20, 40);
} else {
ctx.fillStyle = "red";
}
if (score_face > 0.75) {
ctx.fillStyle = "blue";
mypose.yaw = _mypose_yaw * -180 / Math.PI + 90;
mypose.pitch = Math.asin(2 * (n.y - ear_y) * Math.cos(_mypose_yaw) / Math.abs(p_ear_r.x - p_ear_l.x)) * -180 / Math.PI + 90;
ctx.fillText("Pose: " + mypose.yaw.toFixed(0) + ", " + mypose.pitch.toFixed(0), 20, 60);
} else {
ctx.fillStyle = "red";
}
ctx.fillText("Score: " + score_nose.toFixed(2) + ", " + score_face.toFixed(2), 20, 20);
ctx.fill();
}
function drawPoint(point, ctx) {
ctx.beginPath();
ctx.arc(point.position.x, point.position.y, 3, 0, 2 * Math.PI);
ctx.fillStyle = "pink";
ctx.fill();
}
function drawPointName(point, ctx) {
ctx.font = fontPoint;
ctx.beginPath();
ctx.fillStyle = 'rgba(155, 187, 89, 0.7)';
ctx.fillText(point.part, point.position.x, point.position.y);
ctx.fill();
}
var servo_y, servo_p;
var s_yaw, s_pitch;
var yaw0 = 0, pitch0 = 0;
var mode = 1;
var detect_pose = false;
var smp = new Object();
var max_dps = 300;
var min_dps = 30;
var lpf_a = 0.5;
function constrain(amt, low, high) {
return (amt) < (low) ? (low) : ((amt) > (high) ? (high) : (amt));
};
function diffAngle(ang, crt) {
var ang_d = ang - crt;
while (ang_d < 0 || ang_d > 360) {
if (ang_d < 0) {
ang_d += 360;
} else if (ang_d > 360) {
ang_d -= 360;
}
}
return ang_d;
}
function setServo(yaw, pitch) {
try {
servo_y.angle(yaw);
s_yaw = yaw;
servo_p.angle(pitch);
s_pitch = pitch;
$('#d4').html("SERVO: " + s_yaw.toFixed(2) + ", " + s_pitch.toFixed(2));
} catch (e) {
console.error(e);
return;
}
}
function moveServoToward(yaw, pitch, max_deg, min_deg) {
yaw = lpf_a * s_yaw + (1 - lpf_a) * yaw;
pitch = lpf_a * s_pitch + (1 - lpf_a) * pitch;
setServo(yaw, pitch);
}
function startServo(src, interval) {
updateServo = setInterval(function () {
// console.dir(src);
max_deg = max_dps * (interval / 1000);
min_deg = min_dps * (interval / 1000);
moveServoToward(src.yaw, src.pitch, max_deg, min_deg);
}, interval);
$('#d1').html("RUNNING");
}
function stopServo() {
if (typeof updateServo !== "undefined") {
clearInterval(updateServo);
}
$('#d1').html("STOP");
}
$(document).ready(function () {
$(".view-contents-mode1").hide();
$(".view-contents-mode2").hide();
$(".view-contents-mode3").hide();
$('#btn-set-mode').on('click', function () {
mode = $('[name=select-mode]').val();
console.log('Mode changed! ' + mode);
$('#view-mode').html('MODE' + mode + ': ' + $('[name=select-mode] option:selected').text());
stopServo();
detect_pose = false;
$(".view-contents-mode1").hide();
$(".view-contents-mode2").hide();
$(".view-contents-mode3").hide();
switch (mode) {
case "1":
$(".view-contents-mode1").show();
break;
case "2":
$(".view-contents-mode2").show();
detect_pose = true;
bindPage();
startServo(mypose, 100);
break;
case "3":
$(".view-contents-mode3").show();
detect_pose = true;
bindPage();
startServo(myposition, 100);
break;
}
});
if (window.DeviceOrientationEvent) {
window.addEventListener('deviceorientation', function (eventData) {
$('#d2').html("RAW: " + eventData.alpha.toFixed(2) + ", " + eventData.beta.toFixed(2) + ", " + eventData.gamma.toFixed(2));
smp.raw_yaw = eventData.alpha;
smp.raw_pitch = eventData.beta;
_smp_yaw = diffAngle(eventData.alpha, yaw0);
smp.yaw = constrain(_smp_yaw, 90, 270) - 90;
_smp_pitch = diffAngle(eventData.beta, pitch0);
smp.pitch = constrain(_smp_pitch, 90, 270) - 90;
$('#d3').html("PHONE: " + smp.yaw.toFixed(2) + ", " + smp.pitch.toFixed(2));
});
}
$('.btn-reset').on('click', function () {
setServo(90, 90);
stopServo();
});
$('#btn-start').on('click', function () {
yaw0 = smp.raw_yaw - 180;
pitch0 = smp.raw_pitch - 180;
startServo(smp, 50);
});
$('#btn-stop').on('click', function () {
stopServo();
});
$('#rng-speed').on('input', function () {
var ds = [50, 100, 300, 999];
max_dps = ds[$(this).val() * 1];
if (max_dps == 999) {
min_dps = 0;
} else {
min_dps = Math.max(max_dps * 0.3, 50);
}
});
$('#rng-lpf').on('input', function () {
lpf_a = $(this).val();
});
});
var obniz = new Obniz("");
obniz.onconnect = async function () {
servo_y = obniz.wired("ServoMotor", { signal: 0, vcc: 1, gnd: 2 });
servo_p = obniz.wired("ServoMotor", { signal: 3, vcc: 4, gnd: 5 });
setServo(90, 90);
}
</script>
</html>
ちょっとした留意点
@obniz_io https://t.co/OgORKeYe8S こちらのプログラムをコピペしてそのまま実行しましたら 「io1: heavy output. output voltage is too low when driving high」となって、1つのサーボが動きません、そのサーボを外したら、問題のないもう一個は動作します。
— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日
obnizボードを交換して別にしたら、全く同じ内容で、今度は「io5: heavy output. output voltage is too low when driving high」この現象を解消する方法は誰かがご存知でしたら、お教えいただきたいと思います! #obinz
— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日
初めてつなぐサーボモーターでしょうか。過電流検知している状態なのですが、 https://t.co/Guv9iO52qN にある対処法などを試していただけますでしょうか。
— obniz (@obniz_io) 2018年8月11日
こちらのサーボを使っています。別のテストでは全部動くものです。上記の現象で、何個も入れ替えても、エラーメッセージは変わらなかったです。サーボの問題ではないと推測しております。 pic.twitter.com/zQcw1zzg7q
— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日
小型のサーボモーターですとobnizから電源を供給するのが難しい場合があります。電気的な特性によるもので、もし可能でしたら電源のみ先ほどのリンクにあります方法で供給してみていただけますでしょうか。また、もしそのioのみ具合がわるい場合は https://t.co/O1SNZOJTpO をお試し頂ければと思います
— obniz (@obniz_io) 2018年8月11日
自己診断は今持っている二つのボード両方異常ないの結果です。ちなみに両方最新の1.0.7のファームウェアです。電源のみに方法をちょっとやってみます。
— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日
サーボを五、六個交換してみましたところ
エラーが出ないサーボを見つかりました!
サーボの問題かもしれませんね。
サポートありがとうございました!— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日


この中、動くものもあれば、動かないものもありました。
obnizとの相性の問題のようですね。

動いたとのことでよかったです!小型サーボは電流が流れ出やすいためobnizと相性が悪いものがあります。SG90は注意が必要というのを次のドキュメント更新時に追加いたします。ご連絡ありがとうございました。
— obniz (@obniz_io) 2018年8月11日
こちらこそありがとうございました!
他も色々試してみます!— 川島@ソフトウェア、Web、アプリ、IoT作るのが大好き (@kokensha_tech) 2018年8月11日
obniz本家アカウントの丁寧迅速なフォローありがとうございます!
とても助かりました!みんなフォローしておくといいですよ!
obnizいつも楽しんでいます!
接続
特に難しいことがなく、OLEDで表示した通りに2つのサーボを繋げればOKです!
簡単でしょう!obnizは難しいことを全部内部でやってくれたからです!笑(obnizからは宣伝費をもらっていません!笑)
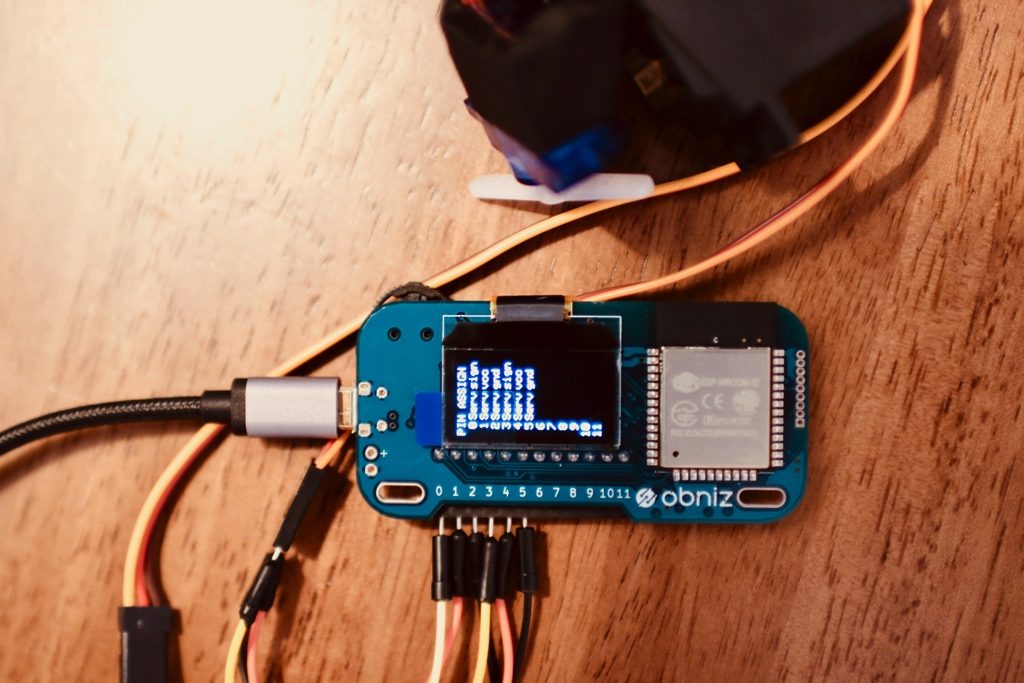
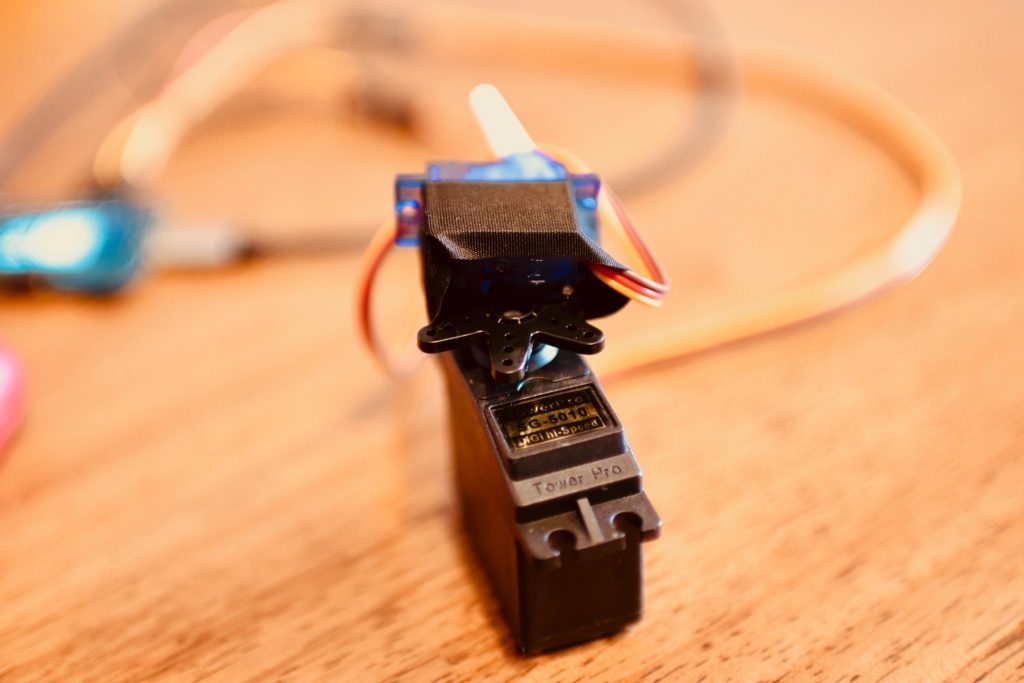
0,1,2に接続しているサーボはサーボ1だとします。
サーボ1は、スマホの水平の回転を反映してくれます。
写真の中の大きめのサーボです(SG5010)
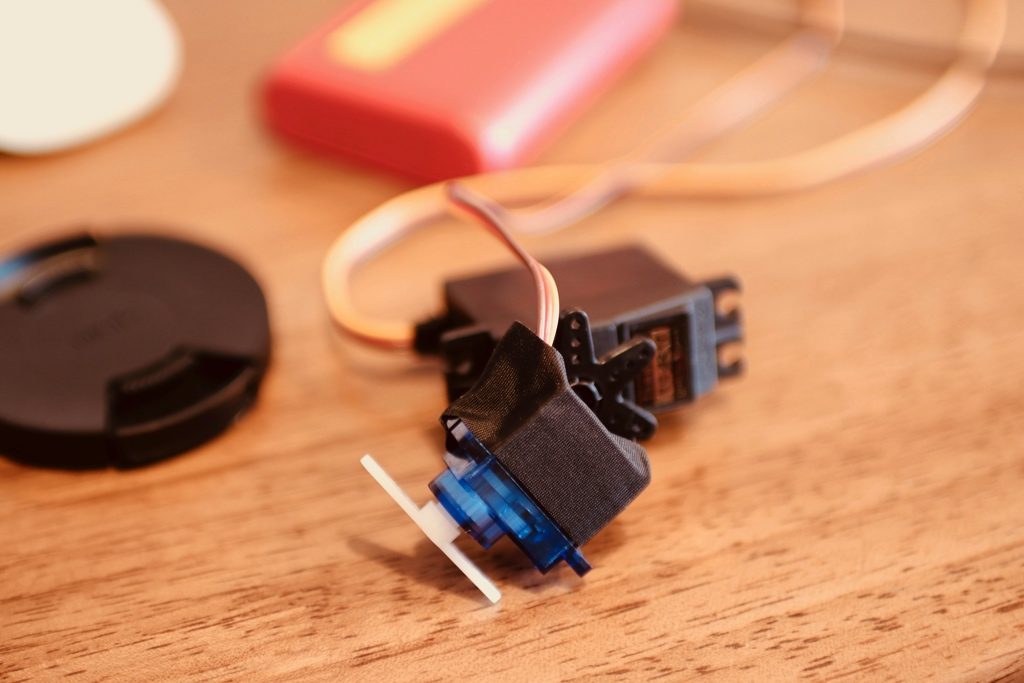
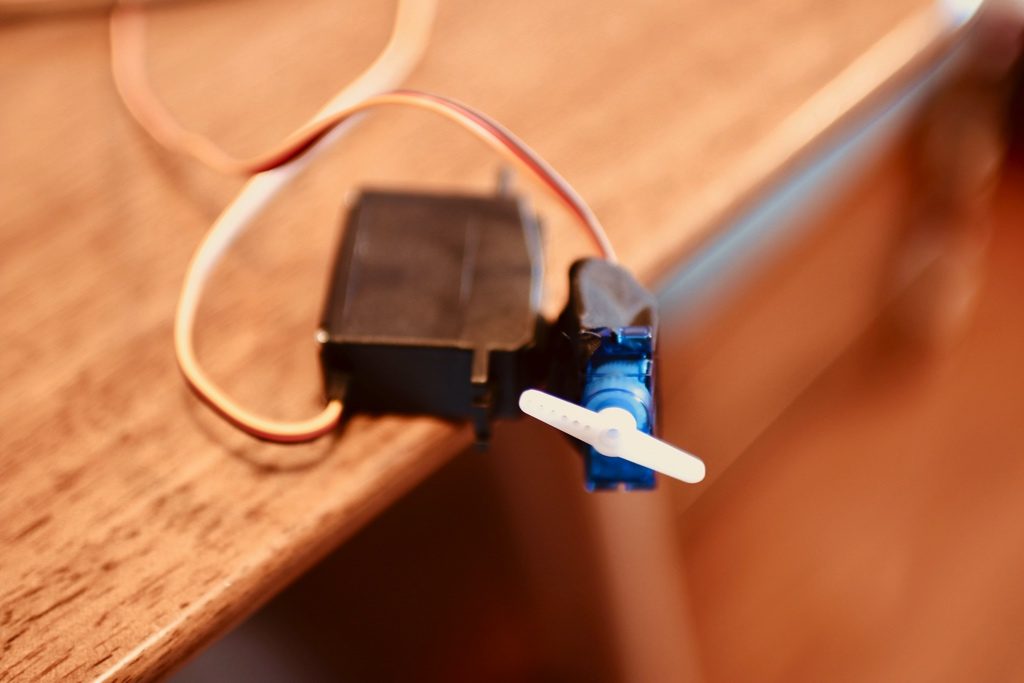
3,4,5と接続しているサーボをサーボ2とします。
サーボ2はスマホの縦の傾きを反映します。(下の動画をご覧ください。)
写真の中にある小さめのサーボ(SG90)です。
両面テーブで、大きめのサーボをテーブルの上に固定します。
小さいサーボを大きサーボのサーボホーンに絶縁テーブで固定します。
手作り感満載です!笑。
いい味が出ています!笑。
プログラムの実行!
obnizのOLEDで表示されているQRコードをスマホでスキャンして
スマホで、obnizのサイトにいきます。
obnizの基本情報知りたい方は、こちらの記事をどうぞ!
スマホ画面を開いて
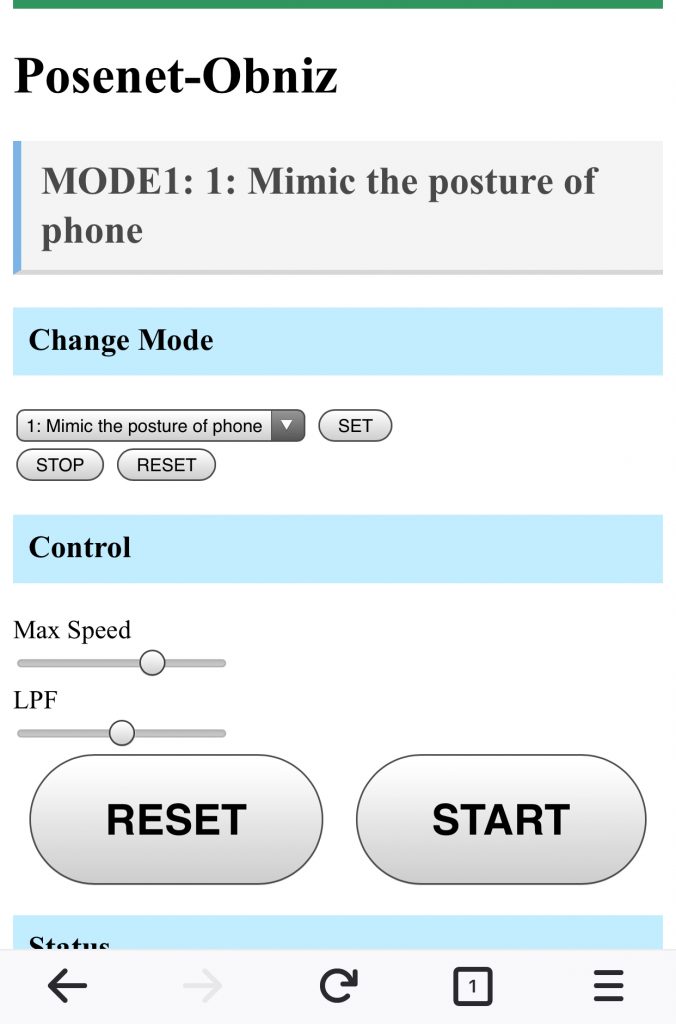

1のMimic the posture of phoneを選んだままに、SETを推します。
そうすると、RESETとSTARTボタンが現れます。STARTボタンを押せば、動作します!!

他また、試したら、まとめます。
では、よい1日を!
[amazonjs asin=”B07DD6FK8G” locale=”JP” title=”obniz (オブナイズ) – クラウドにつながったEaaS開発ボード – クラウドの永久ライセンス付き”]
[amazonjs asin=”B010SLRAAS” locale=”JP” title=”MG996R メタルギア・デジタルサーボ”]
[amazonjs asin=”B00VUJYNWG” locale=”JP” title=”デジタル・マイクロサーボ SG90 (5個)”]